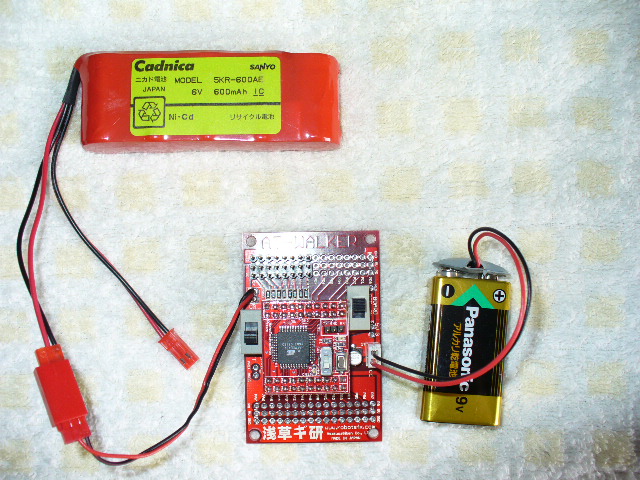
2006年1月、今年は、以前から興味があったロボット作りにチャレンジしようと思いました。 そこで本屋に行き、ロボット関連の本を見ていると、浅草ギ研の『二足歩行ロボット製作超入門』を見つけました。 これによると、材料を一つ一つ買って組み立てる(ロボットのフレームとなるアルミ板の切り出しも自分ですること)ことで、3万円程度で自作の二足歩行ロボットが作れる(ただし足だけ)、となっていました。 用意された部品を組み立てるプラモデルのようなかんじのものは嫌だったので、『これだ』と思って、さっそく買ってみました。 この本には、ロボットの作成に必要な部品の一覧表があるので、それをもとに、福岡市にあるカホパーツセンター(福岡市中央区今泉1丁目9番2号天神ダイヨシビル2F)に部品を買いに行きました。 ところが、いろんな部品があってどれを買ったらいいのかわからず、また、全部の部品がココではそろわないような感じだったので、何も買わずに帰りました。 初心者には、部品の写真がないと、何を買えばいいのわからないものだと思いました。 そういうわけで、まずはインターネットで、このキットを買うことにしたわけです。 部品の実物を見ることができるので、今後、部品を個別に買うときには、迷わなくてすむのではと思っています。 3月4日 楽天市場内のツクモロボット王国で注文 ●4軸二足歩行ロボット:AT-WALKERフルセット 26600円 セット内容 ・浅草ギ研製 4軸二足歩行ロボット:AT-WALKER ・「書籍:二足歩行ロボット製作超入門」 ・KONDO製 5N-600パワーセル(平型) ・KONDO製 5Nタイプバッテリー用充電器 ●送料1575円、消費税1330円 ●合計 29505円 3月8日 商品到着 キットの中身の画像はこちらからどうぞ |
||||||
作成は、商品に付いていた説明書と本の両方を見ながら行いました。 説明書は、すごく簡略化してあったので、詳しいことは本を見て進めました。 なお、説明書と本の内容が違っている部分もありましたので、その辺は、適当に進めました。 それから、浅草ギ研さんのホームページに『二足歩行ロボット製作超入門』に関する掲示板や、二足歩行ロボットの作成に関する掲示板があるので、そういうのも見ながら作りました。 これから作成の手順を書きますが、説明書や本のとおりすればよいところは省略しまして、私が作りながら、もう少し説明してほしいなーと思ったところを書いてみました。 ① マイコンボード用電源の接続 9V電池ケーブルの先端を、マイコンボードに差し込みます。 9V電池は別売りです。とりあえず、近所の店で378円で購入しました。 ②サーボバッテリ用コネクタのハンダ付け 基盤とサーボバッテリ用コネクタをハンダ付けします。 |
|
|||||
 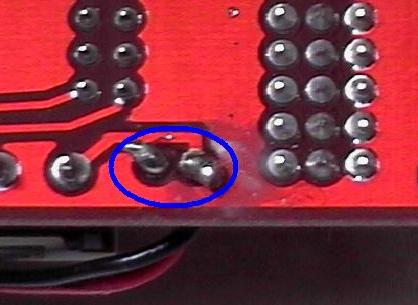 青い○で囲んだところがハンダ付けしたところです。あまりきれいにできませんでした。 |
||||||
| ハンダ付けには当然ですが、ハンダゴテが必要になります。 私が購入した「4軸二足歩行ロボット:AT-WALKERフルセット」にはハンダゴテまでは付いていませんでしたので、福岡市にるカホパーツセンター(福岡市中央区今泉1丁目9-2ダイヨシビル2F)でハンダゴテ(ハンダ付き)(998円)、ハンダゴテ台(998円)を購入しました。 画像はこちらです。 |
||||||
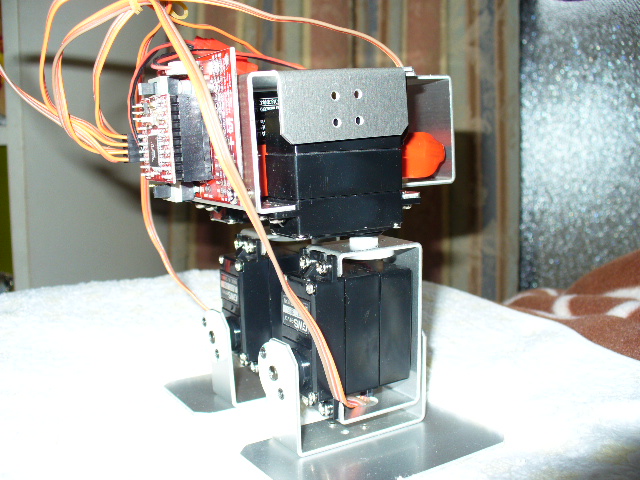
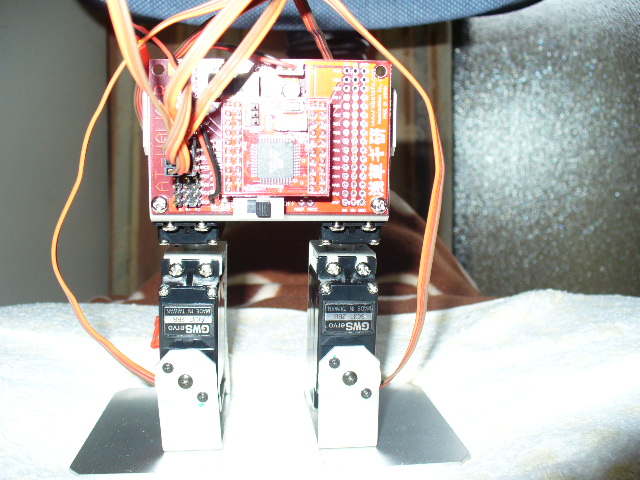
| ここまですると、 右の写真のよう になります。 |
 |
|||||
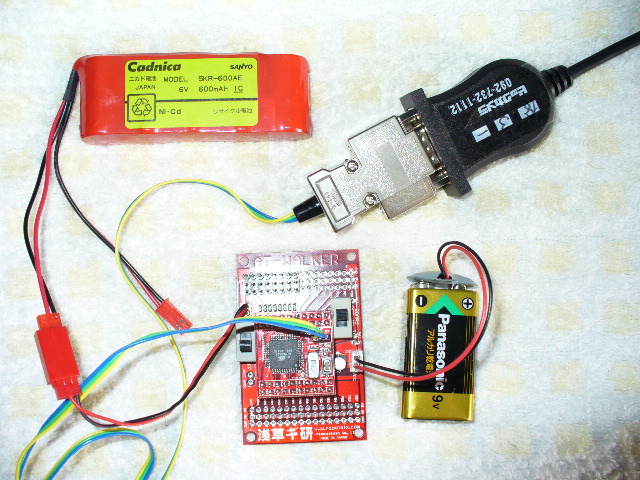
③PCケーブルの接続 PCケーブルとパソコンを接続するわけですが、私のパソコンにはCOMポートがありませんので、本のP59にあるように「USB-シリアル変換ケーブル」が必要でした。 「USB-シリアル変換ケーブル」とはなにかよくわからなかったので、インターネットでいろいろ調べてみました。すると、USBとRS232Cを変換するもののようだということがなんとなくわかりました。(RS232Cがなにかはよくわかりませんでした) とりあえず福岡市にあるビッグカメラ天神店に行ってみると、「USB-RS232C変換ケーブル」という名称で5種類ぐらいありました。価格は2.5~6千円ぐらいでした。 本のP59にもあるように、「・・変換ケーブルは完全にCOMの機能をサポートしていないものがある・・」とのことなのですが、私はこの意味自体がよくわかりませんし、私が見た製品の説明(商品が入ったケースの表や裏に書いてある簡単な説明)を読む限りでは、私の知識ではどれがよくてどれがだめなのか判断できませんでした。 そのため、だめもとで2980円(ロアス ZUR-101)のものを買いました。実際は何の不都合もなく動いているので、高いものを買わなくてよかったと思いました。 |
||||||
  商品についているPCケーブル 「USB-RS232C」変換ケーブル(USB-シリアル変換ケーブル) |
||||||
 |
||||||
|
||||||
④開発環境を整える(GCC Developer Lite(GDL)のダウンロード) 商品の説明書によれば、GDLのダウンロードはGDLをつくったベストテクノロジー社のホームページからダウンロードするようになっていますが、そのGDLはバージョンアップされており、本で紹介されているプログラムがうまく実行されないそうです。 そのため、浅草ギ研のホームページから最適のGDLがダウンロードできるようになっています。(このことは、浅草ギ研の掲示板などに書いてありました) GDLのダウンロードやその後のセットアップの方法は本を見ればいいです。 注意 GDLで作ったプログラムをマイコンに転送するときは、GDLのアイコンを押せばいいのですが、浅草ギ研からダウンロードできるバージョンは標準で(AT-mega128)のAVDUDEのアイコンだけ出てます。これを、下記手順にて「AVDUDE(ATmega32)」に変更する必要があるようです。そうしないと、本のプログラムがうまく実行されないようです。 私の場合は、本のHello.cのプログラムがうまくいかず、2週間以上悩んだのが、これをするだけでうまくいきました。(私は、説明書どおりに進めるだけでなく、本に載ってるプログラムがうまくいくかも確認しながら進めていました) GDLから「ツール」->「外部ツール設定」->「AVDUDE(ATmega32)」(タブです。)から、「ツールメニューへ登録」にチェック(レ)を入れて「OK」を押します。すると、GDLにAVDUDE(ATmega32)のアイコンが追加されます。同様に「AVDUDE(ATmega128)」(タブ)から「ツールメニューへ登録」のチェック(レ)をはずし「OK」を押すと、AVDUDE(ATmega128)のアイコンが消えます。 ⑤サーボを接続する 説明書のとおりにすればいいです。 ⑥プログラムの取得、コンパイル サーボを中心位置に調整するプログラムを浅草ギ研のホームページからダウンロードします。 このプログラムは、本には載っていません。また、サーボ8個を調整できるようになっています。実際にはサーボ4個しか使いませんが、この点については問題はないみたいです。 ⑦フレームの組み立て、ホームポジション設定 ⑥でサーボの位置を中心位置の94にしたわけですが、その位置のまま組み立てます。 説明書のとおりにすればいいです。(本とはパーツC、Dの形が違っていますが、影響はないです) |
||||||
|
||||||
⑧プログラムの取得 ホームポジションの設定プログラムを浅草ギ研のホームページからダウンロードします。 このプログラムは、⑥でダウンロードしたサーボを中心位置に調整するプログラムとほとんど同じです。 ⑨ホームポジションの微調整 ⑥でサーボの位置を中心の94にして、そのまま組み立てていれば、微調整は必要ないでしょう。組み立ての際に、多少ずれるときもあるので、必要であれば、説明書のとおり行います。 ⑩歩行させてみる 前進歩行プログラムを浅草ギ研のホームページからダウンロードします。 |
||||||